Imagine um robô flexível que se move como uma lagarta, sobe paredes verticais e carrega mais que o dobro do seu peso, tudo com uma precisão impressionante. Esse é o SPARC, uma criação conjunta de engenheiros da Universidade de Michigan e da Shanghai Jiao Tong University que combina princípios de origami e robótica leve para alcançar feitos incomuns.
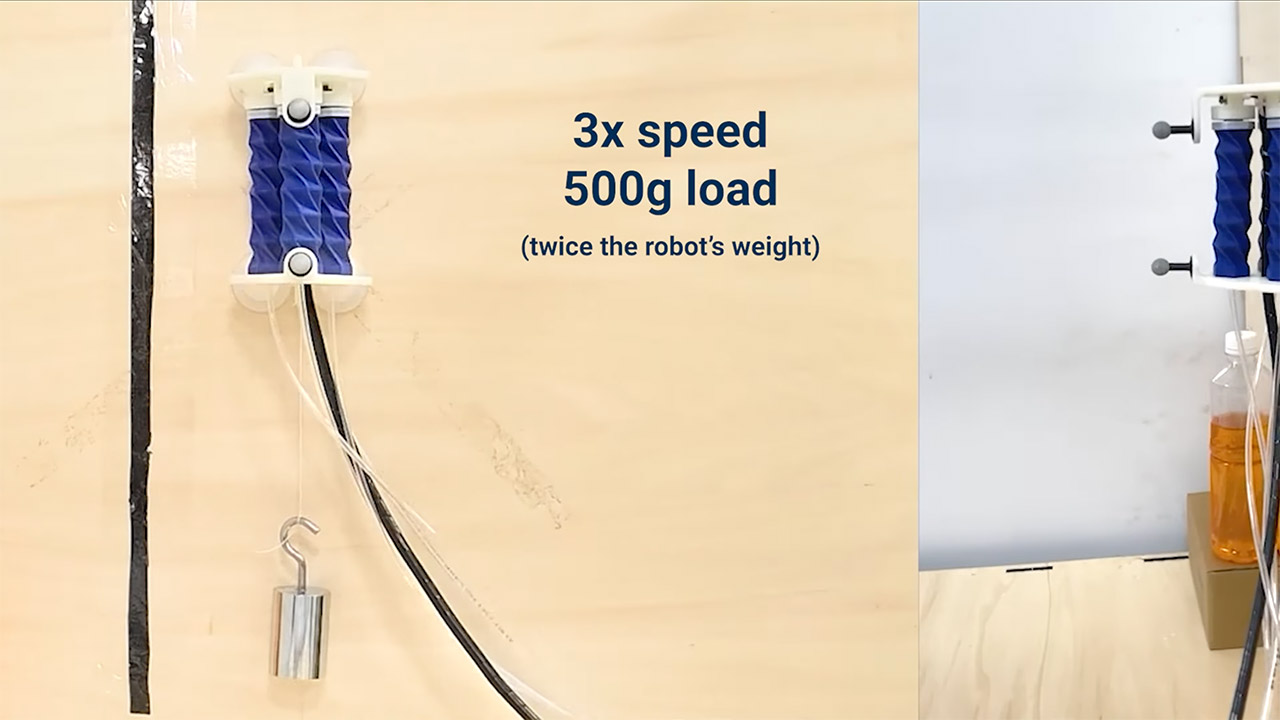
Com menos de 230 gramas, o SPARC (Soft, Proprioceptive, Agile Robot for 3D Climbing) consegue rastrear sua própria posição com margem de erro de apenas 0,5% no chão e 3% na subida de paredes, sem depender de sensores externos. O segredo está em seus três atuadores pneumáticos inspirados no padrão de origami Kresling, uma estrutura em espiral que se contrai e torce de forma previsível quando inflada com ar.
De acordo com Xiaonan Huang, professor envolvido no projeto, a maioria dos robots flexíveis não tem controle preciso porque não “sente” seu próprio movimento. O SPARC resolve isso usando a relação matemática entre torção e contração para calcular sua localização em tempo real, com precisão inferior a 1 milímetro.
Para escalar superfícies lisas, o robô usa ventosas de silicone com design duplo, que garantem aderência sem deformar. Em testes, ele subiu paredes retas e curvadas, e até carregou mais de 500 gramas sem dificuldade. Em demonstração colaborativa, dois unidades trabalharam juntas para transitar do chão para a parede.
A ideia é que no futuro, módulos como o SPARC possam ser usados em tarefas de inspeção, resgate ou manutenção em locais de difícil acesso. A equipe agora trabalha para torná-lo autônomo, eliminando a necessidade de cabos e sistemas externos de energia.
E se um dia você ver um robô macio subindo silenciosamente por uma parede, não se assuste: pode ser apenas o futuro da robótica: flexível, inteligente e inspirado na milenar arte japonesa do papel.
Veja mais sobre tecnologia!